APP参数说明
设置功能包括配置与无人机的遥控器设置、植保设置、遥控器通道检查、电机检查、飞行校准和读取飞行日志等功能。
遥控器设置
图 遥控器设置页面
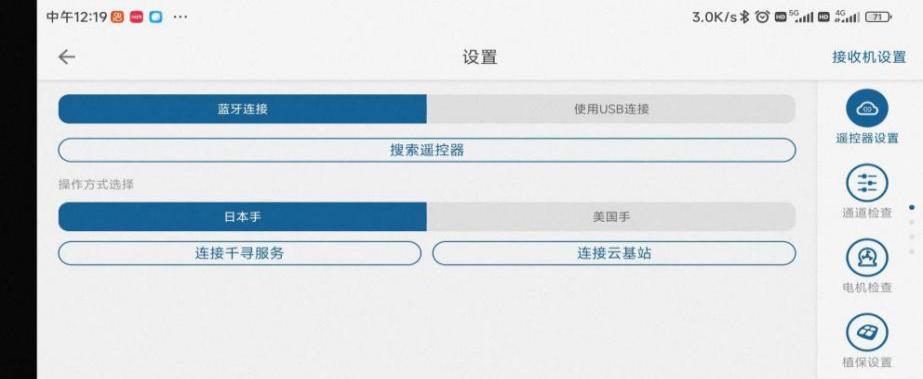
目前支持蓝牙连接方式及USB连接方式。
蓝牙连接模式下点击搜索遥控器,找到遥控器代码并连接成功后,会出现操作方式选择,在上面选择日本手/美国手,在选择好后遥控器上会发出“滴”一声,说明设置成功,右上角为你所连接的遥控器名称。
USB连接模式下,直接用USB线(遥控器自带的连接线)与遥控器连接即可。
通道检测
图 通道检查页面
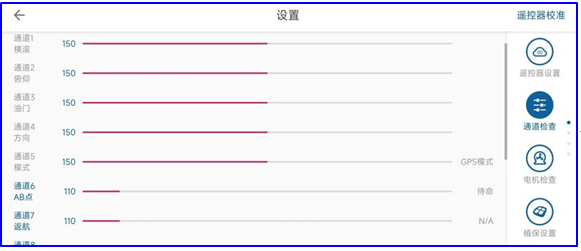
通道检测是用来测试遥控器与无人机是否连接正常,以及判断遥控器是否正常工作。当用户拨动遥控器上的开关、摇动摇杆时,会在地面站上看到相应的通道发生变化。
通道的显示相对应的显示数据如下:
1、通道1234:绿线在150位置;最大数值1200,最小数值100;通道2为反向通道;
2、通道5:如果在手动增稳模式(GPS模式),应为150;如果在姿态模式,应为110;AB点模式,应为190,三段数值分别为110、150、190;
3、通道678:在待命默认位时应为110;三段数值分别为110、150、190;
电机检查
图 电机检查页面

电机检查用来检查无人机的电机是否工作正常(油动直驱不具备电机检查功能)。点击对应每个电机的检查按钮,无人机的电机会旋转,同时在进度条上会显示电机转速情况,以此来判断电机工作情况。最多可以检查8个电机。
在检查的时候需要检查以下几点:
1、电机的转向,单号电机为逆时针;双号电机为顺时针。
2、电机转速,观察电机的转速是否一致。
植保设置
图 植保设置页面
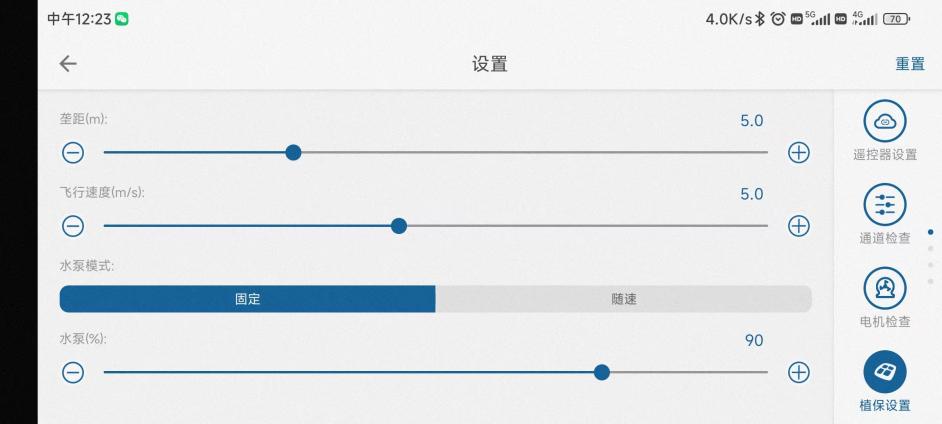
在植保设置中,用户可以调节垄距(AB航线间距),飞行速度(最大速度),以及用两种方式设置喷洒流量(选择固定时设置的时水泵的电机的工作功率百分比从0-100;选择随速时根据飞机的速度最大时的亩用量)。
用户可以通过拖拽滑动条来调整参数,也可以通过点击加减号来进行参数细调。地面站上还有多处调整参数的地方都可以用这2种的操作方式去设置。
飞行设置
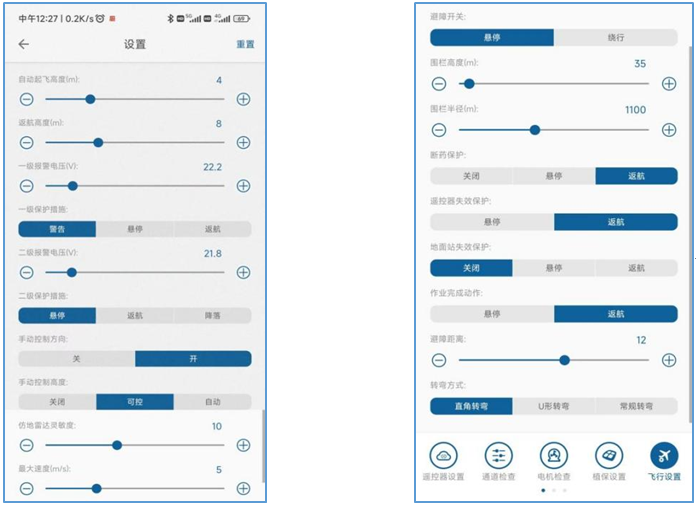
在飞行设置中,用户可以设置:
返航高度:自动返航一键返航模式下,飞机的最低高度。当前飞机如果低于此高度会先升高,如果高于此高度会直接返回再下降。
电压报警阈值及保护措施:设置合理的电压报警阈值,当电压低于此阈值时会触发相应的电压保护动作。油动/混动飞机同时会有两级油量报警设置及保护动作。
手动控制方向:航线中可以手动改变机头指向。默认开。
手动控制高度:航线中可以随时手动调节高度。默认可控。
防地雷达灵敏度:防地情况下使用此灵敏度,增加灵敏度飞机遇到地形起伏时会反应更灵敏。
最大速度:GPS模式手动飞行的最大速度。
避障动作:避障开启时可选择遇到障碍物悬停/绕行。
围栏半径/高度:飞机可以在以起飞点为圆心,以围栏半径为半径园内飞行,超出范围后会报警并返航。以起飞点地面为0,向上不可以超过围栏高度,超过后会触发返航。
断药保护:作业过程中药量低时触发断药保护,可悬停/返航
遥控器失控保护:手动飞行中遥控器失控会触发相应保护,自动航线作业中会继续作业不会触发保护。
地面站失控保护:自动作业模式下,如果地面站链路失效,会触发相应保护动作
作业完成动作:航线作业完成后触发此动作,可悬停/返航
避障距离:飞行中遇到障碍物,进入避障距离后会执行相应的避障动作,悬停/绕行
转弯类型:直角转弯花费时间最长,转弯平稳。U型转弯花费时间最小,转弯速度快,转弯角度大。常规转弯处于两者之间。
日志
图 日志页面

日志页面用来读取无人机上的飞行日志,用来帮助无人机开发人员更好的发现无人机的问题。注:必须要在无人机停在地面上且螺旋桨已锁定的情况下才可以读取日志,以免发生危险。
日志列表中会显示飞控内存储的所有的日志文件,看文件名,第一部分是飞控编号,第二部分是架次号,第三部分是日志文件时间。
每条日志后边第一个按钮是下载按钮,可以把日志从飞控读取到APP本地。当读取完成后,日志后会多出来两个按钮,上传按钮:将日志上传到云服务器,制造商可从云平台获取日志文件。分享按钮:可以可以通过微信/QQ等社交软件发送给其他人。
选中日志后可以按右下角“删除日志”按钮删除。
版本信息
图 版本信息页面
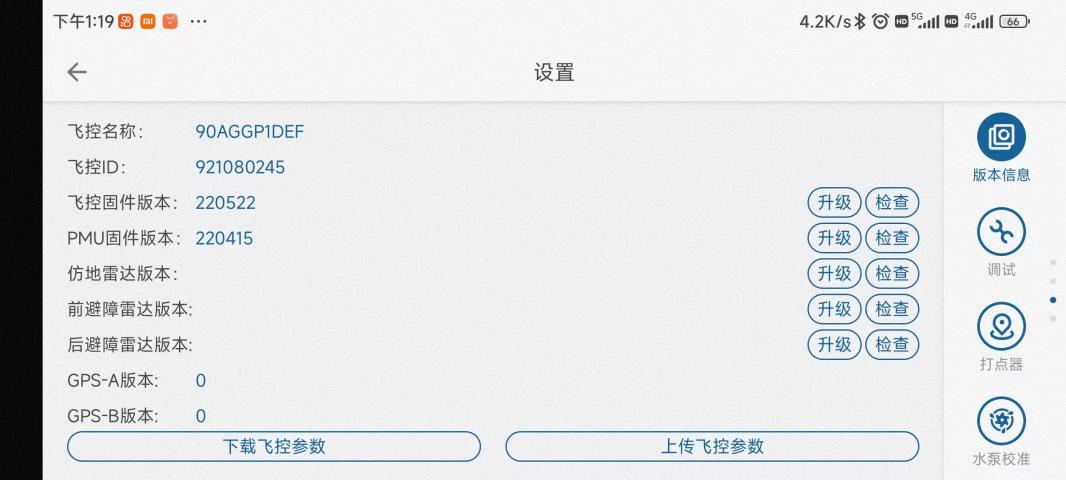
版本信息用于显示地面站版本,飞控固件版本、序列号等信息。也可以在这里检查更新、升级地面站软件和飞控固件等其他固件版本。
飞机电源接上,打开APP连接遥控器后会自主提示有无更新,有更新的话用户可以至版本信息页面来点击检查,下载最新版本固件然后直接升级安装,安装成功后拔飞机电池,再重新连接飞机,重启后再更新其他的固件。
调试
图 调试页面
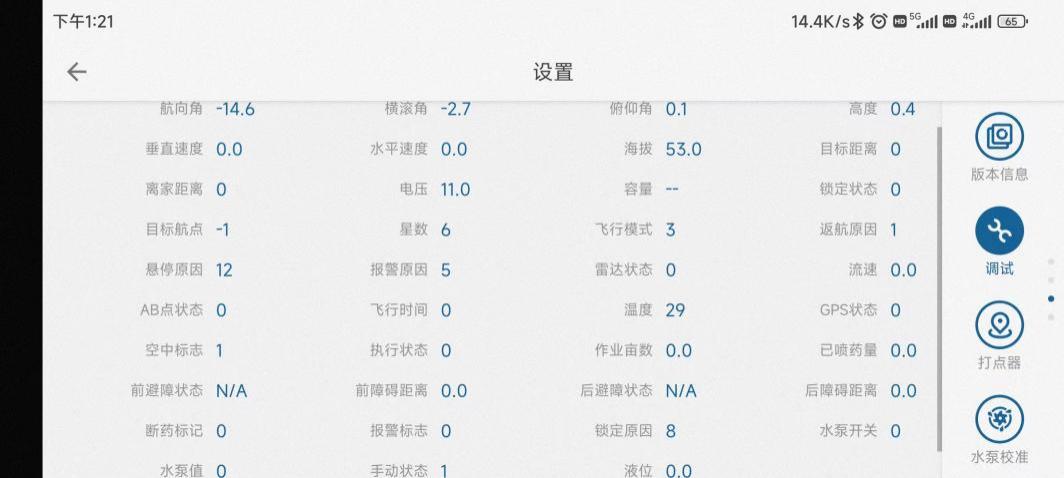
调试页面更详细的显示一些飞控信息。
打点器设置
进入测绘,选择打点器,再选择打点器的蓝牙
智能电池
当使用与飞控匹配的智能电池时,会显示智能电池相关信息,如图。
图 智能电池页面

油电引擎
油电引擎也是隐藏的,只有用油电无人机的时候才会显示,提供数据状态。
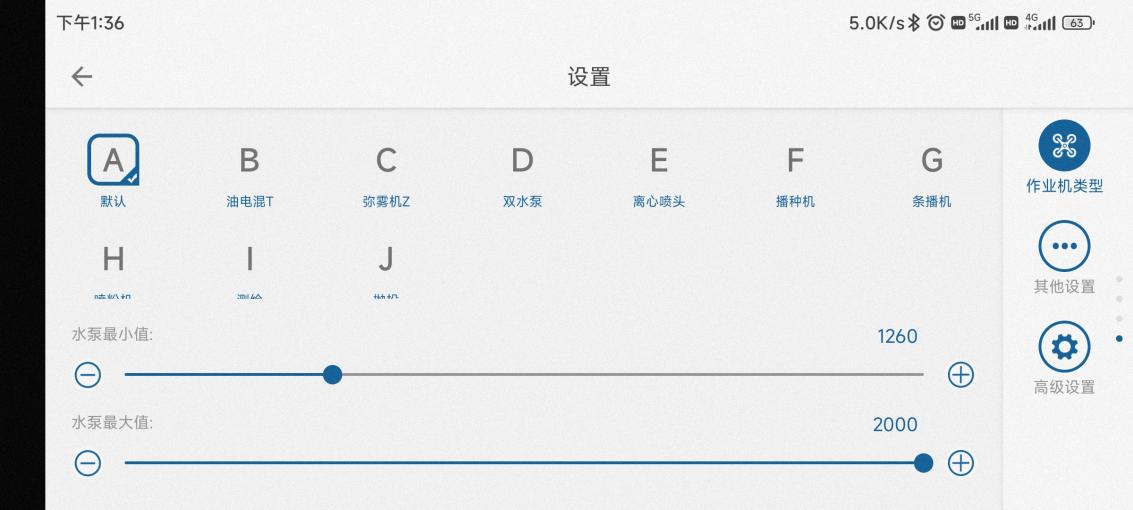
作业机类型
可以配置当前飞机是压力喷头还是离心喷头,是单水泵还是双水泵。
图 作业机类型页面
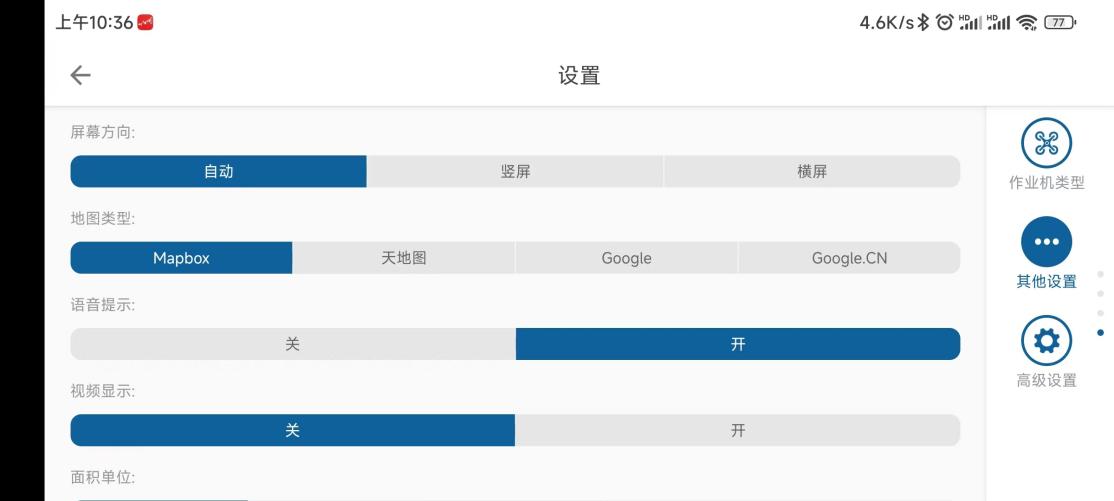
其他设置
其他设置中地图设置,语音提示都可以根据用户的需要自行选择;视频显示只有选配摄像头的用户可以使用。
另:地图类型:国内用mapbox;针对国外用户并手机开放了谷歌地图的在国外飞行时切换谷歌地图,韩国使用Naver
图 其他设置页面
高级设置
注意:只有制造商账户登陆APP才会有高级设置选项。
1)机型设置
图 高级设置-机型设置

设置与飞机匹配的机型类型,注意电机转向及电机序号定义。
2)算法参数
图 高级设置-算法参数
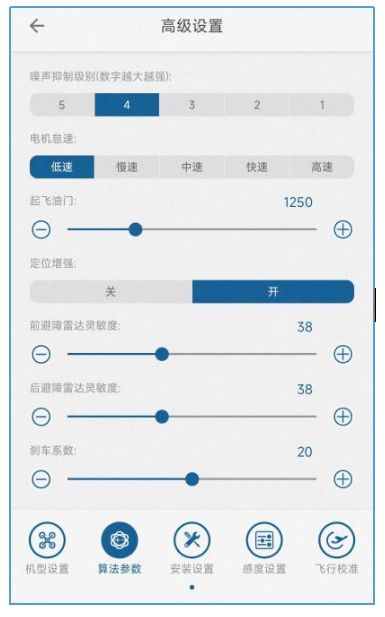
噪声抑制:抑制飞机机体的震动,震动越大的飞机,需要设置的数值越高。此选项的设置需要跟飞机震动情况匹配。选取依据是在基本能飞的参数下,尝试只改变此参数,以飞行状体为依据,选取一个合适的等级。
电机怠速:设置解锁后电机的最低怠速PWM值。此值能让螺旋桨正常转动但不至于拉起来飞机就可。
起飞油门:无效
定位增强:默认开
前后避障灵敏度:避障雷达的灵敏度设置,用于调节避障识别的灵敏度。灵敏度越强识别障碍物约灵敏,同时也会增加误报概率。一般设置40左右。
刹车系数:调节刹车时的灵敏度,灵敏度越小刹车越柔和。默认20
3)安装设置
图 高级设置-安装设置
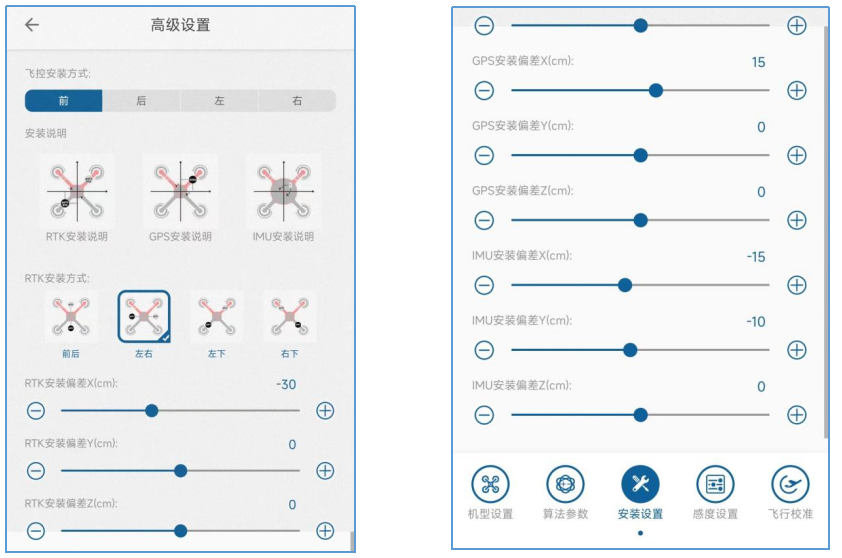
飞控安装方向:设置飞控的安装方向,以飞控箭头为准
RTK安装方向:根据实际情况设置RTK两个天线的安装方向,前后/左右/左下/右下。单天线RTK无需设置。
设置RTK/GPS/IMU安装误差:距离飞机中心位置的偏差,Z轴无需设置。(RTK指RTK天线1.)
4)感度设置
参考2.3 感度调试
5)飞行校准
图 高级设置-飞行校准

水平校准:当飞控水平出现偏差时,做一次水平校准,一般飞控出厂会校准,客户无需校准。
GPSA/B设置:更改GPS主/副,适用于双GPS版本。
定位类型:定位设备类型,根据实际使用设备选择
电池类型:电池类型,根据实际使用电池选择
恢复出厂设置:连续点击5次,会恢复飞控内所有参数到默认。