AB模式
视频教程:https://www.bilibili.com/video/BV1yS4y1N718?spm_id_from=333.999.0.0
AB模式在用户定义A点及B点后,自动复制AB航线进行飞行。AB模式下支持雷达仿地飞行,支持手动避障,支持前后雷达自动避障,支持飞行过程中调节AB航线长度,支持手动调节高度(油门中位默认定高飞行)及机头方向。
AB点作业流程
- 重新AB打点,点击APP手动作业界面内的清除AB点按钮,清除上次的AB点信息,保证飞机内部不存在AB点(若AB点存在,LED会有紫灯闪烁)。
- 手动起飞,飞向第一个起始点,在GPS悬停模式下AB打点通道(CH6)拨码开关从待命拨到A点此时记录A点坐标,A点记录成功后APP会播报A点记录成功,LED灯会1闪紫灯。
- 飞机飞向B点位置,飞行过程中水泵会自动打开,在GPS悬停模式下AB打点通道(CH6)拨码开关从A点拨到B点此时记录B点坐标,B点记录成功后APP会播报B点记录成功,LED灯会2闪紫灯。
- 记录完成后,模式通道(CH5)拨码开关拨到AB模式,然后横滚通道给出一个左/右的满杆动作,此时AB模式开始执行,飞机会向左/右换垄持续飞行。
- 退出AB模式需模式通道(CH5)拨码开关拨到GPS模式/姿态模式即可退出AB模式(此时AB打点通道(CH6)仍在B点位置,建议恢复到默认位置)。若要重新记录AB点需要点击APP手动作业界面内的清除AB点按钮清除上次AB点,此时AB点的2闪紫灯会熄灭表示清除成功。
- 当前AB作业返航后,如果需要AB断点续飞,则不需要清楚AB点,只需要在GPS模式下起飞后,模式通道(CH5)开关拨到AB模式后,飞机自动飞向上次的断点位置执行作业。
图 AB点作业示意图

AB模式飞行中实时调节
1)调节垄长
为了适应不规则地块,AB点长度在飞行过程中可通过俯仰杆实时调节。调节操作如下:
- AB点之延长:当飞机飞到快到边缘的时候,拨动俯仰杆(推或者拉,远端为推,近段为拉),飞机会以2m/s的速度慢慢前进,当快到达延长的位置时,俯仰杆归中,飞机停下,然后开始复制相应的航线,AB点延长完毕。
图 AB点作业航线延长
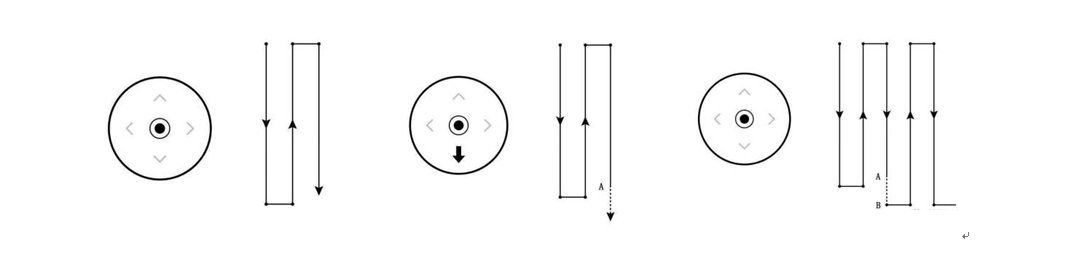
- AB点之缩短:当飞机飞到距离缩短位置相近的时候,拨动俯仰杆(推或者拉,远端为拉,近段为推),飞机会以2m/s的速度慢慢前进,当快到达延长的位置时,俯仰杆归中,飞机停下,然后开始复制相应的航线,AB点缩短完毕。
图 AB点作业航线缩短

2)调节高度
飞行过程中,油门中位则定高飞行(带雷达的情况下定相对高度仿地飞行),油门上推则高度上升,油门下拉则高度下降。
3)调节方向
飞行过程中,方向中位机头锁定飞行,方向左推则机头左转,方向右推则机头右转。
AB模式续飞
当AB模式飞行过程中,当前架次药量低或电压低返航,重新加药换电后需要续飞上次AB点。则按照如下步骤执行AB断点续飞。
手动起飞,在GPS悬停模式下,模式通道(CH5)拨码开关拨到AB模式,此时飞机进入AB模式的断点续飞模式,飞向上一次AB模式退出的地方,然后继续执行AB作业。
图 AB点作业续飞

AB模式避障
1)手动避障
飞机在进行AB作业时,当前面遇到障碍物后,首先拨动横滚杆,飞机会进入手动操作模式,然后向拨打的横滚杆的方向平移,平移到安全偏移量之后,可以进行俯仰杆操作,绕开障碍物,然后所有杆位归中后,飞机会自动回到AB模式下,然后进行后续作业。
图 AB点作业手动避障
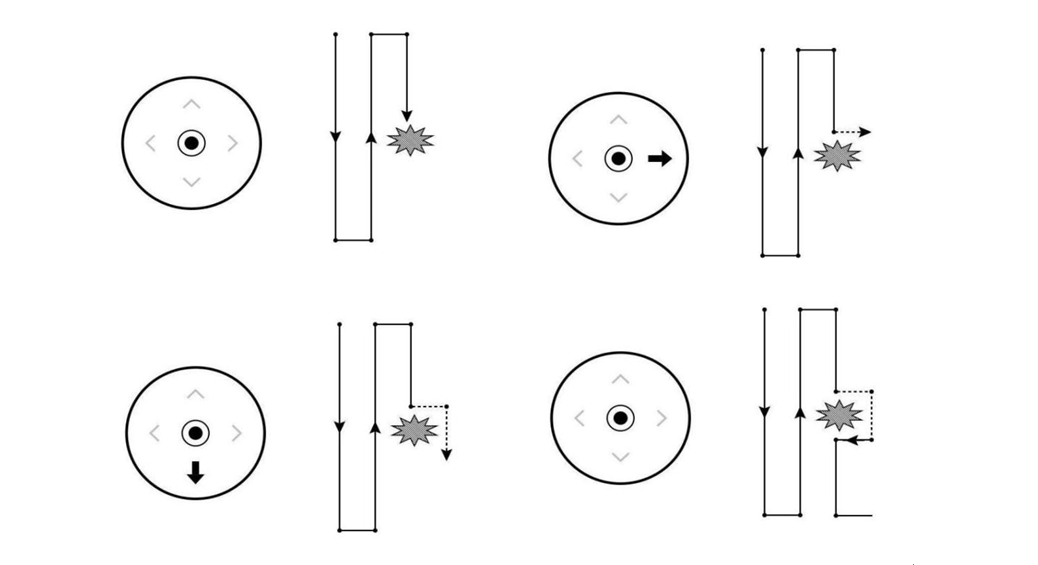
2)自动避障
若飞机装配了避障雷达,当雷达监测到前方/后方有障碍物后,飞机会自动根据APP上面设置的避障动作选择悬停/绕行。若选择的是悬停,遇到障碍物飞机会自动悬停,然后遥控器可以直接打杆进入手动绕障模式;若选择的是绕行,飞机会向一侧平移,直到前方没有障碍物,然后向前飞行2倍的避障距离+5米,如下图:
图 AB点作业雷达避障

AB-T模式
为了方便不是直角的田地使用AB模式作业,在AB模式的基础上,添加了AB-T模式。可通过打点时调整AB点的角度,改变飞机航线,适应更多的复杂地块。
AB-T作业流程
- 重新AB打点,点击APP手动作业界面内的清除AB点按钮,清除上次的AB点信息,保证飞机内部不存在AB点(若AB点存在,LED会有紫灯闪烁)。
- 手动起飞,飞向第一个起始点,在GPS悬停模式下AB打点通道(CH6)拨码开关从待命拨到A点此时记录A点坐标,A点记录成功后APP会播报A点记录成功,LED灯会1闪紫灯。
- A点记录成功后,原地旋转机头对准除AB方向外的另一个地边。点击AB角度按钮,记录A点的角度。
- 飞机飞向B点位置,飞行过程中水泵会自动打开,在GPS悬停模式下AB打点通道(CH6)拨码开关从A点拨到B点此时记录B点坐标,B点记录成功后APP会播报B点记录成功,LED灯会2闪紫灯。
- B点记录成功后,原地旋转机头对准除AB方向外的另一个地边。点击AB角度按钮,记录B点的角度。
- 记录完成后,模式通道(CH5)拨码开关拨到AB模式,然后横滚通道给出一个左/右的满杆动作,此时AB模式开始执行,飞机会向左/右换垄持续飞行。
- 退出AB模式需模式通道(CH5)拨码开关拨到GPS模式/姿态模式即可退出AB模式(此时AB打点通道(CH6)仍在B点位置,建议恢复到默认位置)。若要重新记录AB点需要点击APP手动作业界面内的清除AB点按钮清除上次AB点,此时AB点的2闪紫灯会熄灭表示清除成功。
- 当前AB作业返航后,如果需要AB断点续飞,则不需要清楚AB点,只需要在GPS模式下起飞后,模式通道(CH5)开关拨到AB模式后,飞机自动飞向上次的断点位置执行作业。